- إنضم
- 18 نوفمبر 2021
- المشاركات
- 20,738
- مستوى التفاعل
- 77,337
- المستوي
- 11
- الرتب
- 11
صاروخ موجه ذكي باستخدام مقياس التسارع والجيروسكو ب على أساس طريقة الشبكة العصبية backpropagation للحصول على التغذية الراجعة الخاصة بمخرجات التحكم الأمثل
الباحثين:
كميل فقيه أ، sujito b، *، siti sendari aفايز صايخوني عزيز أطالب دراسات عليا في الهندسة الكهربائية ، قسم الهندسة الكهربائية ، جامعة نيجري مالانججى. Semarang no. 5 sumbersari، lowokwaru، malang، east java، 65145، indonesia(ب) نظام الطاقة الذكي والمتقدم ، قسم الهندسة الكهربائية ، جامعة نيجري مالانججى. Semarang no. 5 sumbersari، lowokwaru، malang، east java، 65145، indonesiaتم استلامه في 25 يوليو 2020 ؛ مقبول 12 أكتوبر 2020 ؛ تم النشر على الإنترنت في 22 ديسمبر 2020
الملخص
كدولة بحرية ذات مساحة كبيرة ، بالإضافة إلى الحاجة للدفاع عن نفسها مع الجيش ، فإنها تحتاج أيضًا إلى حماية نفسها بتقنية الطيران التي يمكن التحكم فيها تلقائيًا. يهدف هذا البحث إلى تطوير نظام دفاع جوي قادر على ذلك التحكم في الصواريخ الموجهة آلياً بدقة عالية. يمكن أن توفر الطريقة الصحيحة مستوى عالٍ من الدقة في التحكم صواريخ على الهدف المستهدف. باستخدام طريقة الشبكة العصبية backpropagation للحصول على تعليقات إخراج التحكم الأمثل ، يمكن ذلك معالجة بيانات المعلومات من الرادار للتحكم في حركة الصاروخ بدرجة عالية من الدقة. يستخدم جهاز التحكم التغذية المرتدة لمخرجات التحكم الأمثل ، والمجهزة بنظام قفل ويستخدم مقياس تسارع يمكنه اكتشاف المنحدر للصاروخ وجيروسكوب يمكنه اكتشاف المنحدر بين اتجاه الهدف للصاروخ لمتابعة الهدف والتحكم موقع واتجاه الصاروخ. يمكن بسهولة تحديد سرعة الحركة المستهدفة ومتابعتها بواسطة الصاروخ من خلال نظام القفل. بيانات أخذ العينات تأتي من الإشارات التي تم إنشاؤها بواسطة الرادارات الموجودة في مناطق الدفاع ومن الصواريخ. يتم حساب سرعة معالجة البيانات لكل جزء باستخدام خوارزمية سريعة يمكن الاعتماد عليها ولديها مستوى من الدقة والسرعةيتم المعالجة. تؤثر معالجة البيانات على دقة تحركات الصواريخ على أي تغيير في موضع وحركة الأهداف والسرعة المستهدفة. دقة المناورة المحسّنة في نظام التدريب الأول يمكنها اكتشاف 1000 ملف بحمولة 273 ، أثناء وجودك فيفي التدريب الأخير ، يمكن للنظام اكتشاف 1000 ملف دون فترة تحميل. لذلك يمكن توجيه الصاروخ ليصيب الهدف بدونعقبات عند المناورة.© 2020 مركز أبحاث الطاقة الكهربائية والميكاترونكس - المعهد الإندونيسي للعلوم. هذا هو مقال مفتوحة المصدربموجب ترخيص cc by-nc-sa (
I. مقدمة
أصبحت الهجمات الجوية مشكلة خطيرة في عالم عسكري. يمكن أن تأتي الهجمات الجوية في شكل صواريخ كروز ، صواريخ قصيرة المدى ، طائرات حربية ، طائرات بدون طيار وغيرها. نتائج المرصد أنتوني داماتو في بحثه بعنوان بأثر رجعي من الغارة الجوية الإسرائيلية ضد مفاعل عسيرق [1] وهو ما يفسر ذلك الإسرائيلي تعتبر الضربات الجوية مفهومة و الدفاعات المشروعة. لذلك في الحرب ، يمكن للضربات الجوية أن تفعل ذلك يمكن تصنيفها على أنها وسيلة للدفاع عن النفس مسموح به حتى لو كان له تأثير قوي و عدد كبير من الضحايا.
التقدم التكنولوجي في يجب تطوير مجال الدفاع الجوي جنبًا إلى جنب مع تطوير التكنولوجيا في أنظمة الهجوم الجوي. الدفاع الجوي ، الذي يتمتع بأكبر قدر من الإمكانات في مواجهة الضربات الجوية هي صواريخ ذات مستوى عال دقة المناورة مصحوبة بنظام الطيار الآلي الذي يمكنه توجيه الصواريخ لضرب الأهداف في الهواء. إلوي جارسيا وآخرون. صف فعالية الدفاع الجوي بموضوع التعاونية دليل صاروخي للدفاع النشط للمركبات الجوية [2]. حول الإجراءات المضادة النشطة ضد الصواريخ الهجمات التي تؤدي إلى الطائرات كهدف ، مع يمكن توقع هدف الضربات الجوية إلى أقصى حد ويمكن تجنب الإصابات والأضرار المادية. أحد أكثر أنظمة الدفاع الجوي المطلوبة هو أ صاروخ يمكن إطلاقه والتحكم فيه تلقائيا.
نظام استهداف الصواريخ بالعلم الموقع المستهدف لنظام التوجيه مثل نظام الملاحة بالقصور الذاتي (ins) ، ومطابقة كفاف التضاريس (tercom) أو نظام تحديد المواقع العالمي (gps). استخدام طريقة ins رياضيا تم تطويره بواسطة castro toscano m، j، et al. ، الموضوع هو الاستخدام المنهجي لأنظمة الملاحة بالقصور الذاتي لـ مهمة التنقل strapdown [3] ، والتي تقدم الأوصاف الرياضية للملاحة بالقصور الذاتي أنظمة وتكامل تطبيقات الجهاز. يستطيع المستشعر الافتراضي اكتشاف وزن التغييرات في الكائن (الهدف) ، احسب المتغيرات مثل السرعة والموقف والموقف على الجسم المتحرك لـ نظام الملاحة. لذلك يمكن لهذا النظام توجيه ملف صاروخ من خلال معرفة موقع الصاروخ والهدف الموقف ، ثم احسب المسافة والموضع على حد سواء. بالنسبة لرادار tercom (على أجسام الصواريخ) استخدام خوارزمية قياس الارتفاع. البحث عن تم تطوير رادار tercom بواسطة zhang hua و hu xiulin مع موضوع خوارزمية قياس الارتفاع تطبق على مقياس الارتفاع الراداري tercom [4] الذي يعمل على قياس مسافة الجسم. لهذا السبب يمكنه تقديم ملاحظات حول مناورة الصاروخ أداء. طريقة واحدة لقفل الصاروخ يستخدم النظام في tercom الأشعة تحت الحمراء. كما تم تطويره بواسطة عبد الرحمن ومازن ر تستخدم طريقة الأشعة تحت الحمراء كاشفًا يمكنه ذلك الكشف عن درجات حرارة عالية عند الهدف للاستجابة لها الدفاعات الصاروخية [5]. تصميم صاروخ بالأشعة تحت الحمراء تم استخدام النظام في فرنسا خلال الحرب العالمية الأولى [6]. كانت مسؤولية الصواريخ عن الأهداف تم تطويره بواسطة kerem g et al. مع الموضوع استجابة تحليل الأداء السطحي ل نظام صواريخ الدفاع الجوي الذي يهدف إلى تقليل العبء الحسابي في كل عملية كشف عند مناورة الصواريخ [7].
كان نظام إطلاق اختبار الصواريخ تم تطويره بواسطة baoquan li et al. حول ال نظام القياس والاختبار الآلي لـ العديد من صواريخ الطيار الآلي أرض جو ، والتي تركز حول استخدام التحكم في الكمبيوتر والوسائط المتعددة التكنولوجيا ، لزيادة سرعة ودقة القياس والاختبار إلى الحد الأقصى و تقليل وقت العمل التدريبي [8]. ابحث عن ذلك يناقش هندسة الصواريخ الدفاعية ناقشها ender. تي وآخرون. مع موضوع فعالية تحليل نظام الأنظمة هندسة الدفاع الصاروخي الباليستي من خلال النمذجة والمحاكاة البديلة [9] ، باستخدام النمذجة والمحاكاة التي تدعم تحليل المستوى المعماري للصواريخ الدفاعية بما في ذلك حساسية المقاييس على المستوى التشغيلي تجاه تشكيل (نظرة عامة) تتبع التكامل و اتخاذ القرارات الصحيحة. مسار الانطلاق ل تم تطوير صواريخ أرض - جو بواسطة guomin و hui gu لمحاكاة مدى توفر أنظمة أسلحة الصواريخ أرض - جو التي تركز عليها تقدير النقاط المستهدفة [10].
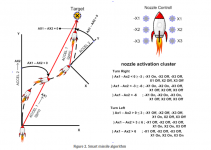
يوفر النظام الذكي للتحكم في الصواريخ الابتكار في تحديد اتجاه الصاروخ التحرك نحو الهدف من خلال استخدام جهاز استشعار التسارع الذي يعمل للتحكم في إمالة الصاروخ ومستشعر الجيروسكوب للكشف ميل الهدف للصاروخ. نظام القفل تم الحصول عليها من البيانات المرسلة من ins و tercom. تم البحث عن الصواريخ باستخدام رادار ins تم تطويره بواسطة xinqi fu و meirong chen [11] تقريبًا تخصيص الصواريخ على أساس معدل الامتصاص النوعي الذي يحمله ثنائي القطب الصواريخ ، التي تستخدم ins دون الاعتماد عليها tercom ، لذا فإن مناورات الصواريخ أقل دقة في مطاردة الهدف لأن الصواريخ تواجه صعوبة الكشف عن الأهداف عندما تكون الصواريخ والأهداف في ارتفاع معين. التحكم الآلي باستخدام المستشعرات تم تطويره بواسطة فقيه. ك وآخرون. مع الموضوع مقياس تجريبي للنظام الكهروضوئي للشبكة الذكية باستخدام شدة ضوء الشمس وحالة الشحن (soc) للبطارية بناء على ممداني تحكم منطقي غامض [12] ، حوالي أنظمة التحكم التي تستخدم أجهزة الاستشعار للأوتوماتيكية التحكم في الأداء على مصادر الطاقة. تم إحراز تقدم كبير في تصميم التغذية الراجعة المثلى للتحكم الناتج باستخدام خوارزمية rl بواسطة modares et al [13]. التحكم الأمثل يتم تطبيقه لتطوير نظام التحكم. في أثناء، تحليل مجال التردد في نظرية التحكم الكلاسيكية يستخدم أيضًا للتحقق من أداء تردد النظام ، بما في ذلك الترددات المتقاطعة ، هوامش الطور ، و هوامش الربح ، مع فرض قيود على الأداء القيم. وحدة التحكم التي تم الحصول عليها هي الإخراج الأمثل تحكم التغذية الراجعة لنموذج مبسط مع متانة معينة. نظرية التحكم الأمثل و يتم الجمع بين تحليل مجال التردد للحصول على السرعة أداء التتبع وظروف الخطأ الصغيرة و بعض المتانة [14]. التحكم الأمثل للصاروخ تم تطوير أنظمة التوجيه بواسطة jingliang صن وآخرون مع موضوع "التحكم الأمثل القوي لـ أنظمة توجيه الهدف الصاروخي عبر التكيف البرمجة الديناميكية "، مع التركيز على فعالية وسيلة قوية للمراقبة المثلى ل اعتراض المناورات مع ردود الفعل باستخدام البرمجة الديناميكية التكيفية (adp) تقنية [15].
لتقليل معدل الخطأ في تحديد نقطة التقاء الصواريخ والأهداف يستخدم نظام الصواريخ الذكية مرشح كالمان في تقدير متغيرات الحالة من خطي منفصل نظام ديناميكي يقلل من الخطأ المقدر التغاير [16]. تقدير آخر هو امتداد يسمى مرشح كالمان مرشح المجموعة كالمان (enkf). في طريقة enkf ، الخوارزمية هي نفذت عن طريق إنتاج مجموعات محددة ل حساب التغاير المتوسط والخطأ للدولة المتغيرات [17]. في استخدام طريقة enkf ، بعض يمكن تنفيذ المخططات بطريقة enkf ، وهو مخطط الجذر التربيعي الذي يمكن أن يكون نفذت في enkf. يمكن أن يؤثر هذا المخطط على نتائج التقدير ، من حيث الدقة و الوقت الحسابي [18] ، لذلك يمكن تطبيقه على تقدير موقع الصاروخ والمحاكاة باستخدام برنامج ماتلاب. تصميم الطيار الآلي على صواريخ الدفاع الجوي تم تطويره بواسطة delin luo et al. [19]. استهداف يتم تحديد الهوية لاختبار الأداء من الطيار الآلي للصاروخ ، لكنه لا يزال غير قادر على اكتشافه اتجاه الهدف الذي تغير بشكل جذري ، وبالتالي فإن الحاجة إلى نظام مناورة أكثر دقة على الصواريخ المجهزة بخوارزميات ذكية. هناك أيضًا دراسة للسيطرة على الصواريخ مع أحد البنوك بدوره (btt) الذي يمكنه اكتشاف التغييرات في الاتجاه المستهدف ، ويمثل ميهتا هذه الدراسة ss مع موضوع الصواريخ التكيفية القائمة على الرؤية التوجيه في وجود تجنب الهدف مناورات [20]. مع التركيز على التقليل المناورة بأخطاء الأهداف التي تكون سرعتها غير معروف ويمكن أن يتغير. لا يزال نظام btt
يتطلب من المشغلين التحكم في اتجاه الصاروخ. لذالا تزال عملية التوجيه يدوية للغاية ، لذا أهناك حاجة إلى متحكم دقيق للضبط تلقائيًاجسم الصاروخ على الهدف.ينقسم نظام مناورة الصواريخ الذكية إلىعدة أنواع من العناقيد حسب الهدفالاتجاه ، البحث عن كتلة اتجاه الصاروختم تطويره بواسطة jan farlik [21]. الموضوع هومحاكاة وحدات صواريخ أرض - جو. الكتلةالنظام الذي ينفذه جان فارليك ليس بعدمجهزة بخوارزمية ذكية ، وبالتالي الهدفقد تكون الدقة أقل استقرارًا في بعض الظروف.تتطلب مناورة الصواريخ التنبؤ بالاجتماعنقطة بين الصاروخ والهدف ، والبحث عنتم تطوير التنبؤ بمناورة الصواريخ بواسطةلي س وآخرون. مع موضوع توجيه الصواريخعلى تتبع مسار الهدف المتوقع [22] التركيزفقط عند تحديد مناورات الصواريخ. حتى لا يكون هناكلا يوجد حل متاح حتى الآن إذا توقف الصاروخعند المناورة. يمكن أن تكون الخوارزميات الذكية أحل لتقليل التدخل في الصواريخمناورات.Backpropagation هو وسيلة فعالة لتعلم الشبكات العصبية وقد تم استخدامه على نطاق واسعفي تطبيقات مختلفة. دقة التعلمالنتيجة ، على الرغم من الحقائق الأخرى ، تتأثر بشدة بـحجم البيانات عالية الجودة المستخدمة في التعلم [23].

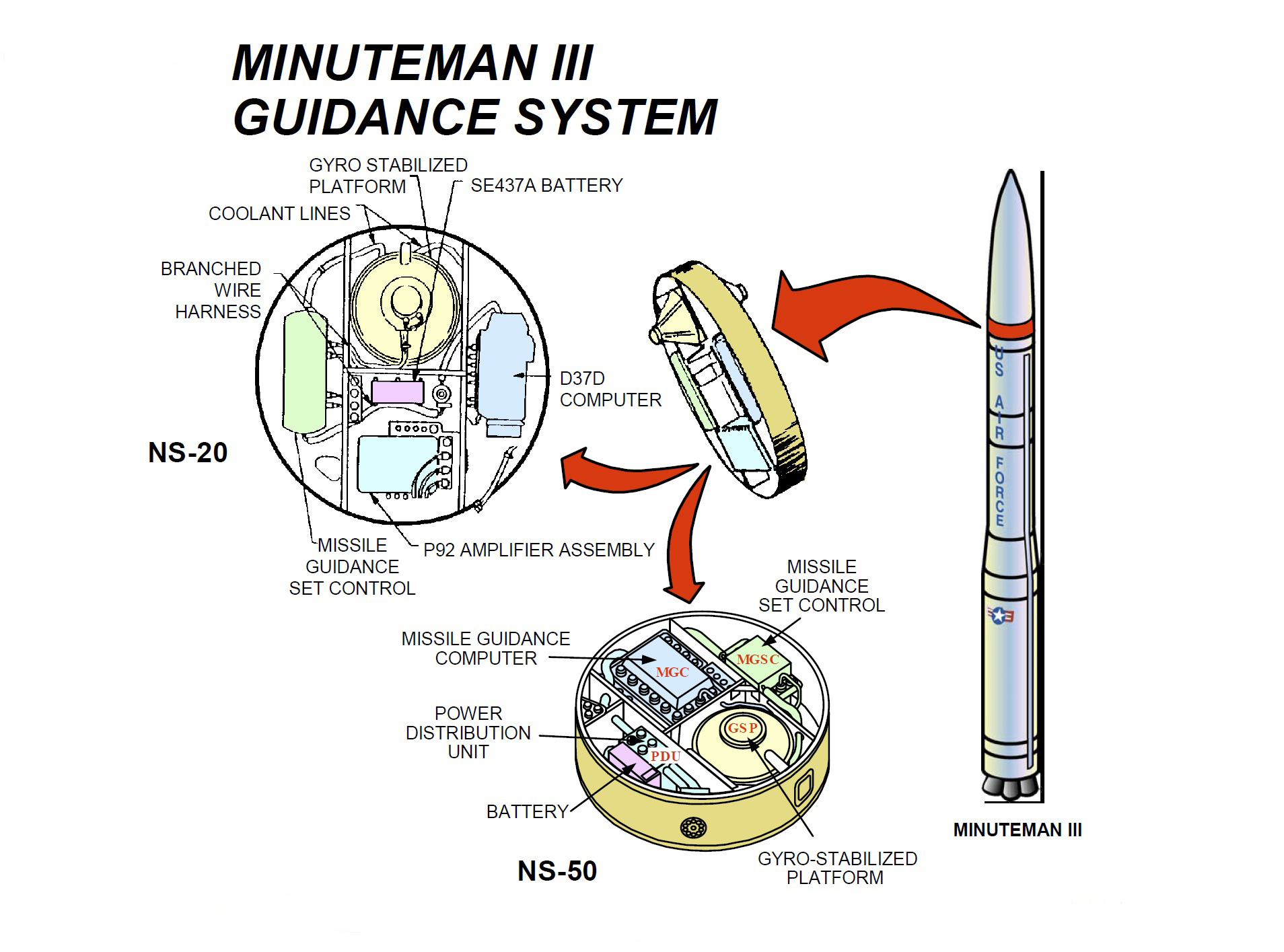
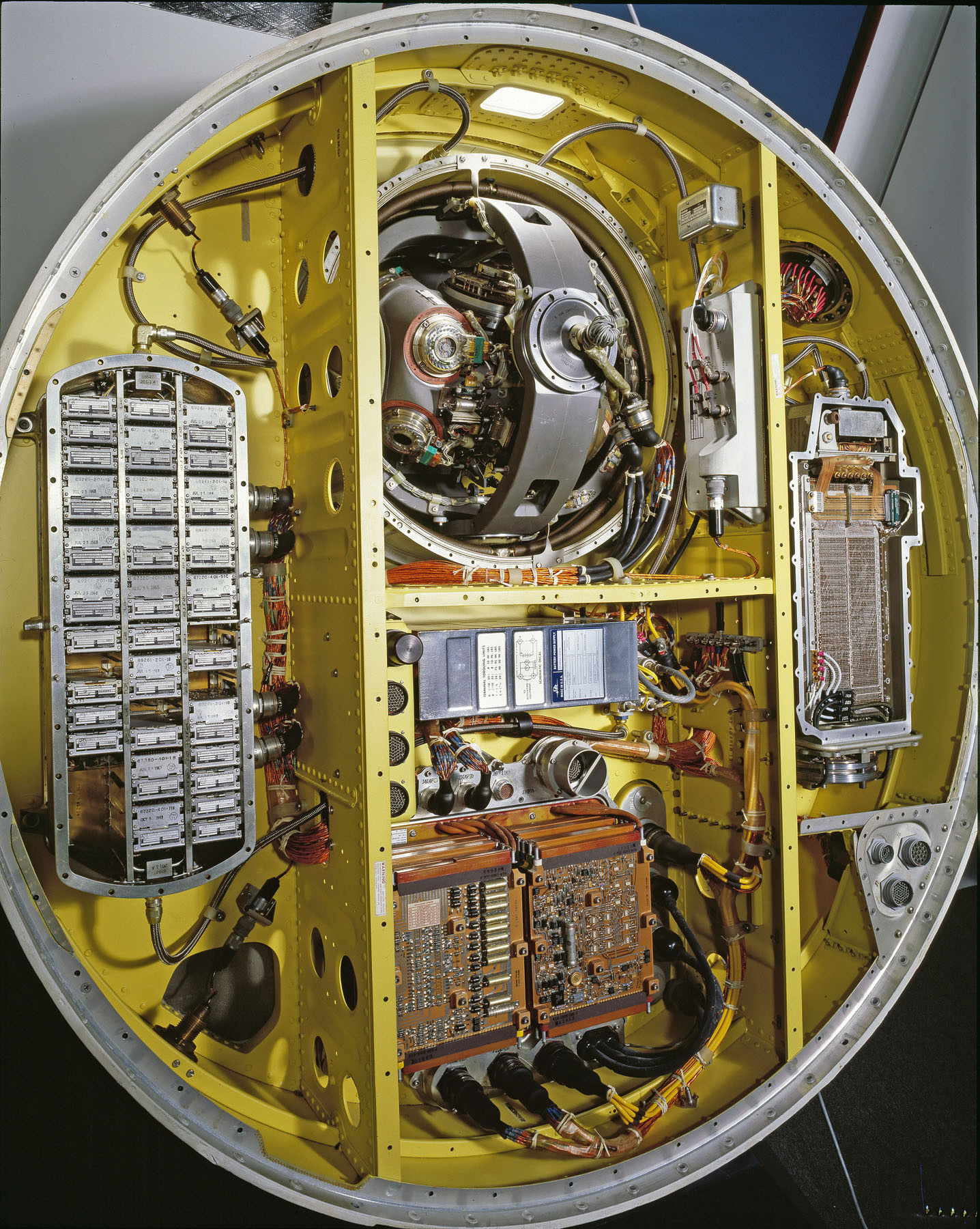
Minuteman Missile Guidance System
الباحثين:
كميل فقيه أ، sujito b، *، siti sendari aفايز صايخوني عزيز أطالب دراسات عليا في الهندسة الكهربائية ، قسم الهندسة الكهربائية ، جامعة نيجري مالانججى. Semarang no. 5 sumbersari، lowokwaru، malang، east java، 65145، indonesia(ب) نظام الطاقة الذكي والمتقدم ، قسم الهندسة الكهربائية ، جامعة نيجري مالانججى. Semarang no. 5 sumbersari، lowokwaru، malang، east java، 65145، indonesiaتم استلامه في 25 يوليو 2020 ؛ مقبول 12 أكتوبر 2020 ؛ تم النشر على الإنترنت في 22 ديسمبر 2020
الملخص
كدولة بحرية ذات مساحة كبيرة ، بالإضافة إلى الحاجة للدفاع عن نفسها مع الجيش ، فإنها تحتاج أيضًا إلى حماية نفسها بتقنية الطيران التي يمكن التحكم فيها تلقائيًا. يهدف هذا البحث إلى تطوير نظام دفاع جوي قادر على ذلك التحكم في الصواريخ الموجهة آلياً بدقة عالية. يمكن أن توفر الطريقة الصحيحة مستوى عالٍ من الدقة في التحكم صواريخ على الهدف المستهدف. باستخدام طريقة الشبكة العصبية backpropagation للحصول على تعليقات إخراج التحكم الأمثل ، يمكن ذلك معالجة بيانات المعلومات من الرادار للتحكم في حركة الصاروخ بدرجة عالية من الدقة. يستخدم جهاز التحكم التغذية المرتدة لمخرجات التحكم الأمثل ، والمجهزة بنظام قفل ويستخدم مقياس تسارع يمكنه اكتشاف المنحدر للصاروخ وجيروسكوب يمكنه اكتشاف المنحدر بين اتجاه الهدف للصاروخ لمتابعة الهدف والتحكم موقع واتجاه الصاروخ. يمكن بسهولة تحديد سرعة الحركة المستهدفة ومتابعتها بواسطة الصاروخ من خلال نظام القفل. بيانات أخذ العينات تأتي من الإشارات التي تم إنشاؤها بواسطة الرادارات الموجودة في مناطق الدفاع ومن الصواريخ. يتم حساب سرعة معالجة البيانات لكل جزء باستخدام خوارزمية سريعة يمكن الاعتماد عليها ولديها مستوى من الدقة والسرعةيتم المعالجة. تؤثر معالجة البيانات على دقة تحركات الصواريخ على أي تغيير في موضع وحركة الأهداف والسرعة المستهدفة. دقة المناورة المحسّنة في نظام التدريب الأول يمكنها اكتشاف 1000 ملف بحمولة 273 ، أثناء وجودك فيفي التدريب الأخير ، يمكن للنظام اكتشاف 1000 ملف دون فترة تحميل. لذلك يمكن توجيه الصاروخ ليصيب الهدف بدونعقبات عند المناورة.© 2020 مركز أبحاث الطاقة الكهربائية والميكاترونكس - المعهد الإندونيسي للعلوم. هذا هو مقال مفتوحة المصدربموجب ترخيص cc by-nc-sa (
من فضلك,
تسجيل الدخول
أو
تسجيل
لعرض المحتوي!
الرئيسية: صاروخ ذكي. التكاثر العكسي. الشبكة العصبية؛ التحكم الأمثل ردود الفعل الإخراج ؛ قفل النظام.
Minuteman Missile Guidance System
I. مقدمة
أصبحت الهجمات الجوية مشكلة خطيرة في عالم عسكري. يمكن أن تأتي الهجمات الجوية في شكل صواريخ كروز ، صواريخ قصيرة المدى ، طائرات حربية ، طائرات بدون طيار وغيرها. نتائج المرصد أنتوني داماتو في بحثه بعنوان بأثر رجعي من الغارة الجوية الإسرائيلية ضد مفاعل عسيرق [1] وهو ما يفسر ذلك الإسرائيلي تعتبر الضربات الجوية مفهومة و الدفاعات المشروعة. لذلك في الحرب ، يمكن للضربات الجوية أن تفعل ذلك يمكن تصنيفها على أنها وسيلة للدفاع عن النفس مسموح به حتى لو كان له تأثير قوي و عدد كبير من الضحايا.
التقدم التكنولوجي في يجب تطوير مجال الدفاع الجوي جنبًا إلى جنب مع تطوير التكنولوجيا في أنظمة الهجوم الجوي. الدفاع الجوي ، الذي يتمتع بأكبر قدر من الإمكانات في مواجهة الضربات الجوية هي صواريخ ذات مستوى عال دقة المناورة مصحوبة بنظام الطيار الآلي الذي يمكنه توجيه الصواريخ لضرب الأهداف في الهواء. إلوي جارسيا وآخرون. صف فعالية الدفاع الجوي بموضوع التعاونية دليل صاروخي للدفاع النشط للمركبات الجوية [2]. حول الإجراءات المضادة النشطة ضد الصواريخ الهجمات التي تؤدي إلى الطائرات كهدف ، مع يمكن توقع هدف الضربات الجوية إلى أقصى حد ويمكن تجنب الإصابات والأضرار المادية. أحد أكثر أنظمة الدفاع الجوي المطلوبة هو أ صاروخ يمكن إطلاقه والتحكم فيه تلقائيا.
نظام استهداف الصواريخ بالعلم الموقع المستهدف لنظام التوجيه مثل نظام الملاحة بالقصور الذاتي (ins) ، ومطابقة كفاف التضاريس (tercom) أو نظام تحديد المواقع العالمي (gps). استخدام طريقة ins رياضيا تم تطويره بواسطة castro toscano m، j، et al. ، الموضوع هو الاستخدام المنهجي لأنظمة الملاحة بالقصور الذاتي لـ مهمة التنقل strapdown [3] ، والتي تقدم الأوصاف الرياضية للملاحة بالقصور الذاتي أنظمة وتكامل تطبيقات الجهاز. يستطيع المستشعر الافتراضي اكتشاف وزن التغييرات في الكائن (الهدف) ، احسب المتغيرات مثل السرعة والموقف والموقف على الجسم المتحرك لـ نظام الملاحة. لذلك يمكن لهذا النظام توجيه ملف صاروخ من خلال معرفة موقع الصاروخ والهدف الموقف ، ثم احسب المسافة والموضع على حد سواء. بالنسبة لرادار tercom (على أجسام الصواريخ) استخدام خوارزمية قياس الارتفاع. البحث عن تم تطوير رادار tercom بواسطة zhang hua و hu xiulin مع موضوع خوارزمية قياس الارتفاع تطبق على مقياس الارتفاع الراداري tercom [4] الذي يعمل على قياس مسافة الجسم. لهذا السبب يمكنه تقديم ملاحظات حول مناورة الصاروخ أداء. طريقة واحدة لقفل الصاروخ يستخدم النظام في tercom الأشعة تحت الحمراء. كما تم تطويره بواسطة عبد الرحمن ومازن ر تستخدم طريقة الأشعة تحت الحمراء كاشفًا يمكنه ذلك الكشف عن درجات حرارة عالية عند الهدف للاستجابة لها الدفاعات الصاروخية [5]. تصميم صاروخ بالأشعة تحت الحمراء تم استخدام النظام في فرنسا خلال الحرب العالمية الأولى [6]. كانت مسؤولية الصواريخ عن الأهداف تم تطويره بواسطة kerem g et al. مع الموضوع استجابة تحليل الأداء السطحي ل نظام صواريخ الدفاع الجوي الذي يهدف إلى تقليل العبء الحسابي في كل عملية كشف عند مناورة الصواريخ [7].
كان نظام إطلاق اختبار الصواريخ تم تطويره بواسطة baoquan li et al. حول ال نظام القياس والاختبار الآلي لـ العديد من صواريخ الطيار الآلي أرض جو ، والتي تركز حول استخدام التحكم في الكمبيوتر والوسائط المتعددة التكنولوجيا ، لزيادة سرعة ودقة القياس والاختبار إلى الحد الأقصى و تقليل وقت العمل التدريبي [8]. ابحث عن ذلك يناقش هندسة الصواريخ الدفاعية ناقشها ender. تي وآخرون. مع موضوع فعالية تحليل نظام الأنظمة هندسة الدفاع الصاروخي الباليستي من خلال النمذجة والمحاكاة البديلة [9] ، باستخدام النمذجة والمحاكاة التي تدعم تحليل المستوى المعماري للصواريخ الدفاعية بما في ذلك حساسية المقاييس على المستوى التشغيلي تجاه تشكيل (نظرة عامة) تتبع التكامل و اتخاذ القرارات الصحيحة. مسار الانطلاق ل تم تطوير صواريخ أرض - جو بواسطة guomin و hui gu لمحاكاة مدى توفر أنظمة أسلحة الصواريخ أرض - جو التي تركز عليها تقدير النقاط المستهدفة [10].
يوفر النظام الذكي للتحكم في الصواريخ الابتكار في تحديد اتجاه الصاروخ التحرك نحو الهدف من خلال استخدام جهاز استشعار التسارع الذي يعمل للتحكم في إمالة الصاروخ ومستشعر الجيروسكوب للكشف ميل الهدف للصاروخ. نظام القفل تم الحصول عليها من البيانات المرسلة من ins و tercom. تم البحث عن الصواريخ باستخدام رادار ins تم تطويره بواسطة xinqi fu و meirong chen [11] تقريبًا تخصيص الصواريخ على أساس معدل الامتصاص النوعي الذي يحمله ثنائي القطب الصواريخ ، التي تستخدم ins دون الاعتماد عليها tercom ، لذا فإن مناورات الصواريخ أقل دقة في مطاردة الهدف لأن الصواريخ تواجه صعوبة الكشف عن الأهداف عندما تكون الصواريخ والأهداف في ارتفاع معين. التحكم الآلي باستخدام المستشعرات تم تطويره بواسطة فقيه. ك وآخرون. مع الموضوع مقياس تجريبي للنظام الكهروضوئي للشبكة الذكية باستخدام شدة ضوء الشمس وحالة الشحن (soc) للبطارية بناء على ممداني تحكم منطقي غامض [12] ، حوالي أنظمة التحكم التي تستخدم أجهزة الاستشعار للأوتوماتيكية التحكم في الأداء على مصادر الطاقة. تم إحراز تقدم كبير في تصميم التغذية الراجعة المثلى للتحكم الناتج باستخدام خوارزمية rl بواسطة modares et al [13]. التحكم الأمثل يتم تطبيقه لتطوير نظام التحكم. في أثناء، تحليل مجال التردد في نظرية التحكم الكلاسيكية يستخدم أيضًا للتحقق من أداء تردد النظام ، بما في ذلك الترددات المتقاطعة ، هوامش الطور ، و هوامش الربح ، مع فرض قيود على الأداء القيم. وحدة التحكم التي تم الحصول عليها هي الإخراج الأمثل تحكم التغذية الراجعة لنموذج مبسط مع متانة معينة. نظرية التحكم الأمثل و يتم الجمع بين تحليل مجال التردد للحصول على السرعة أداء التتبع وظروف الخطأ الصغيرة و بعض المتانة [14]. التحكم الأمثل للصاروخ تم تطوير أنظمة التوجيه بواسطة jingliang صن وآخرون مع موضوع "التحكم الأمثل القوي لـ أنظمة توجيه الهدف الصاروخي عبر التكيف البرمجة الديناميكية "، مع التركيز على فعالية وسيلة قوية للمراقبة المثلى ل اعتراض المناورات مع ردود الفعل باستخدام البرمجة الديناميكية التكيفية (adp) تقنية [15].
لتقليل معدل الخطأ في تحديد نقطة التقاء الصواريخ والأهداف يستخدم نظام الصواريخ الذكية مرشح كالمان في تقدير متغيرات الحالة من خطي منفصل نظام ديناميكي يقلل من الخطأ المقدر التغاير [16]. تقدير آخر هو امتداد يسمى مرشح كالمان مرشح المجموعة كالمان (enkf). في طريقة enkf ، الخوارزمية هي نفذت عن طريق إنتاج مجموعات محددة ل حساب التغاير المتوسط والخطأ للدولة المتغيرات [17]. في استخدام طريقة enkf ، بعض يمكن تنفيذ المخططات بطريقة enkf ، وهو مخطط الجذر التربيعي الذي يمكن أن يكون نفذت في enkf. يمكن أن يؤثر هذا المخطط على نتائج التقدير ، من حيث الدقة و الوقت الحسابي [18] ، لذلك يمكن تطبيقه على تقدير موقع الصاروخ والمحاكاة باستخدام برنامج ماتلاب. تصميم الطيار الآلي على صواريخ الدفاع الجوي تم تطويره بواسطة delin luo et al. [19]. استهداف يتم تحديد الهوية لاختبار الأداء من الطيار الآلي للصاروخ ، لكنه لا يزال غير قادر على اكتشافه اتجاه الهدف الذي تغير بشكل جذري ، وبالتالي فإن الحاجة إلى نظام مناورة أكثر دقة على الصواريخ المجهزة بخوارزميات ذكية. هناك أيضًا دراسة للسيطرة على الصواريخ مع أحد البنوك بدوره (btt) الذي يمكنه اكتشاف التغييرات في الاتجاه المستهدف ، ويمثل ميهتا هذه الدراسة ss مع موضوع الصواريخ التكيفية القائمة على الرؤية التوجيه في وجود تجنب الهدف مناورات [20]. مع التركيز على التقليل المناورة بأخطاء الأهداف التي تكون سرعتها غير معروف ويمكن أن يتغير. لا يزال نظام btt
يتطلب من المشغلين التحكم في اتجاه الصاروخ. لذالا تزال عملية التوجيه يدوية للغاية ، لذا أهناك حاجة إلى متحكم دقيق للضبط تلقائيًاجسم الصاروخ على الهدف.ينقسم نظام مناورة الصواريخ الذكية إلىعدة أنواع من العناقيد حسب الهدفالاتجاه ، البحث عن كتلة اتجاه الصاروختم تطويره بواسطة jan farlik [21]. الموضوع هومحاكاة وحدات صواريخ أرض - جو. الكتلةالنظام الذي ينفذه جان فارليك ليس بعدمجهزة بخوارزمية ذكية ، وبالتالي الهدفقد تكون الدقة أقل استقرارًا في بعض الظروف.تتطلب مناورة الصواريخ التنبؤ بالاجتماعنقطة بين الصاروخ والهدف ، والبحث عنتم تطوير التنبؤ بمناورة الصواريخ بواسطةلي س وآخرون. مع موضوع توجيه الصواريخعلى تتبع مسار الهدف المتوقع [22] التركيزفقط عند تحديد مناورات الصواريخ. حتى لا يكون هناكلا يوجد حل متاح حتى الآن إذا توقف الصاروخعند المناورة. يمكن أن تكون الخوارزميات الذكية أحل لتقليل التدخل في الصواريخمناورات.Backpropagation هو وسيلة فعالة لتعلم الشبكات العصبية وقد تم استخدامه على نطاق واسعفي تطبيقات مختلفة. دقة التعلمالنتيجة ، على الرغم من الحقائق الأخرى ، تتأثر بشدة بـحجم البيانات عالية الجودة المستخدمة في التعلم [23].